Thanks very much for watching! And please remember to hit like and subscribe! :)
Following is a product I use picked at random from my collection which may appear in my videos. Clicking through on this to find and click on the green affiliate links before purchasing from eBay or AliExpress is a great way to support the channel at no cost to you. Thanks!
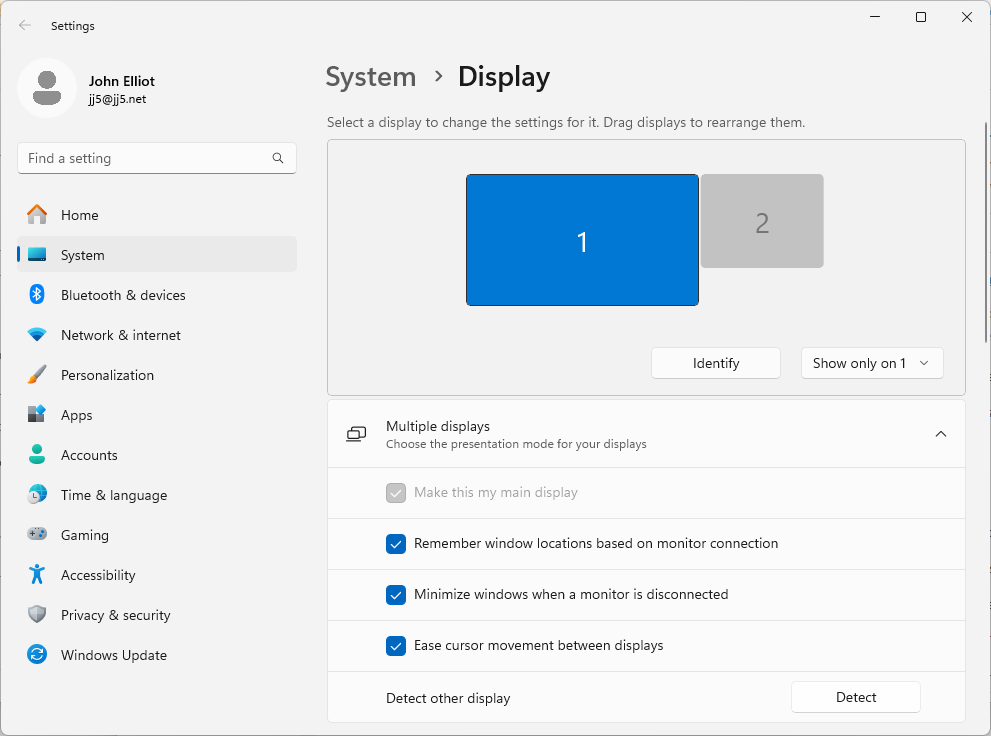
I have a problem with my TightVNC server where when I “unplug” the monitor (i.e. use my KVM to select a different workstation) then my display vanishes from my VNC client. To fix this I installed Virtual Display Driver. I downloaded and installed the Beta: Virtual Driver Control (25.7.23) (you should check for newer version at the previous link). I extracted VDD.Control.25.7.23.zip then ran the “VDD Control.exe” program and clicked “Install Driver”. After that I just had to tweak my graphics settings, which I did like this: