John Teel explains about some sensors to avoid in real products
Reply

Today I learned about two things which made me excited for the future of The Internet again:
Today I purchased the following ebooks for The Art of Computer Programming (TAOCP) by the venerable Donald Knuth:
Today I got myself two scientific calculators:
One graphing calculator:
And a few books about how to use them:
If you’re interested in such things you might like to check out Developing a Scientific Calculator Easier for Everyone to Use, the story of the Casio ClassWiz models.
I also considered:
On my iPhone I have:

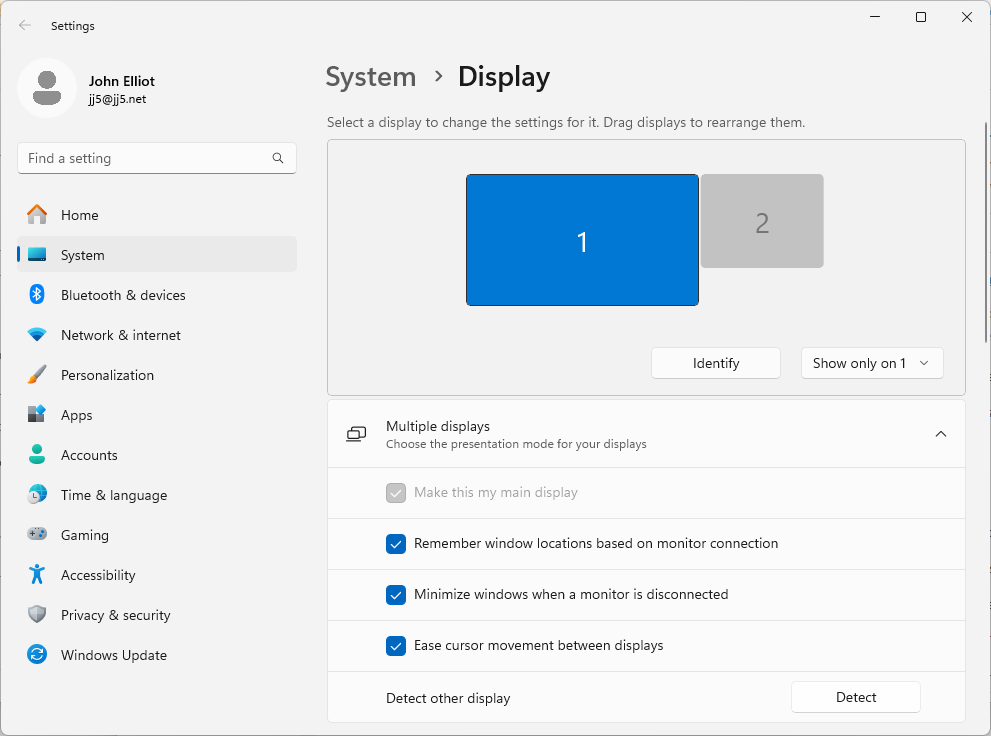
I have a problem with my TightVNC server where when I “unplug” the monitor (i.e. use my KVM to select a different workstation) then my display vanishes from my VNC client. To fix this I installed Virtual Display Driver. I downloaded and installed the Beta: Virtual Driver Control (25.7.23) (you should check for newer version at the previous link). I extracted VDD.Control.25.7.23.zip then ran the “VDD Control.exe” program and clicked “Install Driver”. After that I just had to tweak my graphics settings, which I did like this:
The most brutal mistake intelligent people make is this: they keep explaining themselves to people who are committed to misunderstanding them. You think stupidity needs correction. No. Sometimes stupidity needs distance because the moment you argue with a foolish person you step into their battle field. They do not need truth, they need noise. They do not want clarity. They want reaction. And if they can pull anger out of you they will call that anger proof that they were right. So before you waste your mind on someone who cannot even control their own mouth, remember this: wisdom is not winning every argument. Wisdom is knowing which people are not worth the cost of your peace. The first mistake intelligent make is believing every foolish person deserves a full explanation. They do not. Some people are not confused because the truth is hidden. They are confused because confusion protects their ego. You can bring a lamp into a dark room but you cannot force a blind man to open his eyes. And if you keep standing there, holding the lamp, begging him to see, you are no longer wise, you are wasting your fire. Listen carefully, your intelligence is not proven by how many arguments you win. Your intelligence is proven by how much peace you protect. A weak mind needs to defeat everyone. A trained mind knows that some battles are traps wearing the mask of conversation. Some people do not ask questions because they want answers. They ask questions because they want your energy. They want to pull you from your center. Make you explain yourself. Make you repeat what was already clear. Make you become frustrated, emotional, reactive; and then they point at your reaction and say “See! You are the problem!”. This is how foolishness wins. Not by being right. By making calm people lose balance. The intelligent person understands one hard truth: not every mind is ready for wisdom. Some people hear only enough to misunderstand you. Some people listen only for a word they can twist. Some people turn simple truth into drama, because drama gives them importance. When they cannot rise to clarity, they drag clarity down into noise. And if you are not careful you will kneel in the mud to argue with someone who enjoys living there. Do not confuse patience with surrender. Do not confuse kindness with weakness. Do not confuse silence with defeat. There are times when the most powerful answer is not another sentence, but a calm face, a steady breath, and a decision to walk away without hatred. A foolish person wants you to enter their storm. An intelligent person becomes the mountain. When someone says something shallow, insulting, arrogant, or completely without awareness, your first impulse may be to correct them. That impulse feels noble, it feels like justice. But look deeper. Sometimes the desire to correct is only the ego wearing a teacher’s robe. You want them to understand because part of you cannot tolerate being misunderstood. You want them to admit you are right because part of you still needs applause from people who do not even respect truth. That is the hidden weakness intelligent people must destroy. The need to be recognized by those who cannot recognize value. A diamond does not beg a stone to understand its shine. A river does not explain movement to a wall. The sun does not chase those who close their curtains. It simply rises. It simply remains what it is. When you deal with foolish people, the first discipline is restraint. Restraint is not passivity. Restraint is strength under command. Any animal can react. Any angry person can shout. Any insecure person can prove a point for twenty minutes. But to feel the heat rise inside you and still choose your response. That is mastery. To hear disrespect and not become disrespectful. That is mastery. To see ignorance and not become bitter. That is mastery. Do not spend your life donating your nerve system to every person who speaks without thinking. Some people are foolish because they lack knowledge. These people can be taught. They may be clumsy, but they are sincere. They may ask simple questions but they are open. Do not mock them. Do not punish them for not knowing what you know. Intelligence without compassion becomes arrogance. And arrogance is only another kind of stupidity. The wise person knows the difference between ignorance that is willing to learn and ignorance that is proud of itself. This difference decides everything. When a person is willing to learn, give them patience. When a person is proud of not learning, give them distance. You do not water a dead branch and call it gardening. You do not keep knocking on a locked door and call it loyalty. You do not keep explaining truth to someone who benefits from not understanding it and call it wisdom. Many intelligent people suffer because they have powerful minds but weak boundaries. They can analyze everyone, understand everyone, forgive everyone, explain everyone, but they cannot protect themselves from everyone. They think, “if I say it better, they will understand; if I give another example, they will understand; if I stay calm long enough, they will understand.” No. Some people understand perfectly, they simply do not care. That sentence is uncomfortable because it removes the fantasy. It means the problem is not your wording. It is not your tone. It is not your lack of evidence. It is their refusal to meet reality honestly. When you finally accept this your life becomes lighter. You stop carrying conversations that should have ended long ago. You stop debating with people who treat truth like a toy. You stop trying to make careless people careful. You stop trying to make cruel people gentle. You stop trying to make small minds honor large ideas. And then your energy returns to you. The trained mind does not ask “how do I make this person see?” It asks, “is this person capable of seeing?” This is not judgement, it is discernment. Judgement says, “I am better than you.” Discernment says, “this path will waste my life.” Judgement comes from ego. Discernment comes from clarity. When someone is being foolish, pause before you respond. The pause is a sword. In that small space you recover your freedom. Without the pause their words control your body, their tone controls you face. Their ignorance controls you breathing. But in the pause you remember, “I do not have to attend every argument I am invited to; I do not have to answer every accusation; I do not have to correct every false version of me; I do not have to turn my peace into a court room.” This is where power begins. The intelligent person studies patterns, not promises, Foolish people often promise change after damage is done. They apologize when consequences arrive. They become humble when you are leaving. They listen when your patience is gone. But the wise person does not get hypnotized by a moment of softness after a long pattern of chaos. A pattern is the truth repeated over time. If someone repeatedly misunderstands you in ways that benefit them, that is not misunderstanding. If someone repeatedly disrespects your boundaries and then acts surprised, that is not confusion. If someone repeatedly creates drama and then calls you sensitive, that is not honesty. It is manipulation dressed as innocence. You must stop being impressed by words and start respecting evidence. A foolish person can speak like a victim after behaving like a tyrant. They can use spiritual language, emotional language, intellectual language, even kind language, to hide a lack of character. Do not be fooled by the decoration. Watch the fruit. A tree is known by what it produces, not by what it claims to be. If a person produces confusion, exhaustion, guilt, anxiety, and repeated disrespect, do not call it love, do not call it friendship, do not call it family duty, call it what it is: a drain. And intelligent people do not build homes around drains. They deal with foolishness by refusing to feed it. Foolishness grows when it receives attention. It grows when you defend yourself too much. It grows when you over-explain. It grows when you stay available for nonsense. It grows when your emotional reaction become entertainment for someone else. There are people who do not want solutions. They want a stage. They want conflict because conflict makes them feel alive. Peace feels empty to them, because they have never built anything inside themselves. So they provoke, accuse. exaggerate, interrupt, and repeat the same broken argument. Then they wait for you to respond with the same intensity. Do not perform in their theater. Answer once if the situation deserves it. Answer clearly. Answer calmly. Then stop. Repetition is not communication when the other person is committed to distortion. The more you repeat yourself the more you train them that your boundaries are negotiable. Say what is true. Say it cleanly. Then let silence to the work. Silence is not empty. Silence is a mirror. It shows people what they are without your energy covering it. But silence must come from strength, not fear. If you stay silent because you are afraid your body will store resentment. If you stay silent because you are clear your body will store peace. There is a difference. One silence is oppression, the other is mastery. An intelligent person does not avoid confrontation. They avoid useless confrontation. When something matters, they speak. When a boundary must be set, they set it. When harm is being done, they do not hide behind calmness, like a coward hiding behind a curtain. Real wisdom is not weakness wearing white clothes. Real wisdom can say no. Real wisdom can leave. Real wisdom can cut access. Real wisdom can disappoint people without becoming cruel. You are not here to be understood by everyone. You are here to live with integrity. The foolish person often believes volume is strength. They speak louder because they cannot think deeper. They interrupt because silence would expose them. They attack character because they cannot answer logic. They laugh at what they do not understand because mockery is easier than growth. If you meet their volume with volume you enter their level. If you meet their insult with insult you become their reflection. If you meet their chaos with chaos they have recruited you. The wise person changes the rhythm. They lower their voice. They slow the breath. They make fewer words carry more weight. They do not rush to fill every silence. They do not chase the person running away from truth. They do not hand over emotional control to someone who cannot control themselves. This is not easy. Do not pretend it is easy. Your ego will burn. Your pride will whisper, “say one more thing; crush them; show them; make them regret speaking to you that way.” But every time you obey that voice, you feed the weakest part of yourself. You may win the argument and lose your discipline. You may make them quiet and make yourself dirty. You may prove your intelligence and expose your immaturity. The highest intelligence is not sharpness. It is self command. Ask yourself this: “after the argument is over, what remains?” Did your life improve? Did your body become calmer? Did your work become stronger? Did your home become more peaceful? Did your future become clearer? Or did you spend thirty minutes throwing your mind into a pit and calling it victory. Most arguments with foolish people are not battles. They are leaks. Small leaks sink large ships. Small daily irritations destroy powerful minds. Small repeated exposures to nonsense turned focused people into bitter people. This is why you must guard your attention like a sacred gate. Everything you give attention to enters you. Everything you argue with leaves a stain. Everything you entertain becomes part of your inner climate. Do not let foolishness become the weather inside you. When you meet a stupid comment do not immediately react to the comment. Look at the person. Look at the pattern. Look at the context. Is this a child like mistake? Or is this adult arrogance? Is this lack of information, or lack of humility? Is this a person seeking truth, or seeking dominance? The response must match the reality. To the sincere beginner, be gentle. To the arrogant fool, be brief. To the manipulator, be silent and distant. To the aggressive person, be firm and protected. To the repeated offender, be unavailable. This is not cruelty, this is order. Many people have been trained to believe that being good means being endlessly accessible. That is false. Goodness without boundaries becomes self betrayal. Compassion without wisdom becomes a doorway for abuse. Patience without limits becomes permission. You can respect someone’s humanity without giving them access to your peace. This one truth will save you years of suffering. Access is earned. Your time is not publish property. Your mind is not a public road. Your emotional energy is not a charity for people who refuse to grow. You do not need hatred to create distance. You do not need anger to say no. You do not need a dramatic ending to stop participating. You can simply withdraw your fuel. Foolish people often reveal themselves when you stop feeding them. When you stop explaining, they accuse you of being cold. When you stop reacting, they accuse you of being arrogant. When you stop chasing, they accuse you of changing. Of course you changed. You stopped bleeding for people who called the wound a misunderstanding. Let them call it whatever helps them sleep. The intelligent person does not live by the opinions of unstable people. If someone’s judgement changes with their mood why are you treating it like law? If someone praises you when you obey them, and insults you when you choose yourself, why are you calling their opinion truth? If someone only respects your boundaries when they benefit from them, why are you giving them authority over your self worth? You must be careful whose voice you allow to echo inside your head. Not every criticism deserves reflection. Some criticism is wisdom. Some criticism is projection. Some criticism is control. Some criticism is jealousy in formal clothing. Some criticism is just noise from a person angry that you are not as lost as they are. The intelligent person listens without becoming a prisoner. They ask, “is there truth here?” If yes, they take the truth and improve. If no, they leave the noise and move on. They do not swallow poison just because someone served it with confidence. This is a discipline. Take the lesson without taking the wound. When foolish people insult you they often reveal more about their inner world than your actual character. A bitter person will see arrogance in your confidence. A lazy person will see obsession in your discipline. A dishonest person will see manipulation in your clarity. A chaotic person will see control in your boundaries. A small person will see threat in your growth. Do not shrink because someone else is uncomfortable with your size. But also do not become addicted to feeling superior. This is a subtle trap. Many intelligent people secretly enjoy being surrounded by fools because it lets them feel special without doing deeper work. They complain about stupidity but they choose environments where stupidity is normal. They mock shallow people but they keep giving shallow people their time. Why? Because compared to them they feel powerful. This is not intelligence. This is comfort. If you are truly intelligent stop using other people’s foolishness as proof of your greatness. Build something. Master something. Heal something. Create something. Discipline your body. Train your mind. Clean your habits. Improve your speech. Strengthen your attention. Do not stand beside a broken wall and call yourself tall. The measure of intelligence is not how clearly you see other people’s stupidity. The measure is how ruthlessly you remove your own. Where are you foolish? Where do you repeat the same pain and expect a different result? Where do you keep giving chances to people who have already given you evidence? Where do you argue when you should leave? Where do you stay silent when you should speak? Where do you mistake over-thinking for wisdom. Where do you use your intelligence to justify your fear? This is where the real work begins. It is easy to identify foolishness in others. It is painful to identify it in yourself. But the intelligent person does not fear that pain. They bow to it. They study it. They use it as a teacher. They know that every fool outside them can only disturb what remains undisciplined inside them. If someone can steal your peace with one sentence, do not only blame their sentence. Study your attachment. Study the wound that reacted. Study the pride that demanded respect. Study the insecurity that needed agreement. The foolish person may have knocked on the door. But something inside you opened it. This does not excuse them. It strengthens you. You cannot control the number of foolish people in the world. You can control the number of foolish exchanges you enter. You can control how long you remain available. You can control whether you answer from ego or from clarity. You can control whether you build your day around purpose or around reaction. Most people lose their life not in one dramatic failure but in small daily surrenders of attention. A comment pulls them. A message pulls them. A rumor pulls them. A disrespectful tone pulls them. A foolish opinion pulls them. By evening they are exhausted, not because they worked deeply, but because they reacted constantly. Do not call that a life. A trained person protects the morning. They do not begin the day by drinking from the cup of other people’s noise. They do not give the first hour of the mind to messages, arguments, gossip, comments, and opinions. They sit with themselves. They breathe. They move. They prepare the inner ground. Because once the world enters you it is harder to clean the room. If you know you will face foolish people, prepare before you meed them. Do not walk into chaos empty. A hungry mind becomes impatient. A tired body becomes reactive. An untrained breath becomes anger. Sometimes the person in front of you is not the only problem. Your lack of preparation makes them more powerful than they are. Intelligent must be embodied. It cannot remain in thoughts only. You can know every philosophy and still lose control when someone disrespects you. You can understand psychology and still answer every provocation. You can speak beautifully about peace and still become a slave to one foolish person’s mood. Knowledge that does not reach the nervous system is decoration. Train until calm becomes physical. When something provokes you, feel your feet, relax your jaw, lower your shoulders. Let the breath drop into the body. Do not rush. Rushing is how foolishness grabs the steering wheel. A slow response is a controlled response. A controlled response is a powerful response. Sometimes the best sentence is, “I understand your view.” Not because you agree, because you refuse to wrestle. Sometimes the best sentence is, “I am not discussing this further.” Not because you cannot defend yourself, because you are done donating your mind. Sometimes the best sentence is, “that is not acceptable.” Not because you are angry, because the boundary is clear. Sometimes the best sentence is nothing at all. Your words should be gates, not spilled water. Before speaking ask, “will this create clarity or will this create more fog? Will this protect dignity or feed ego? Will this solve something or only satisfy the animal inside me? Is this person listening? Or only waiting to strike? Is this my responsibility, or my habit of rescuing? Does this conversation deserve my life?” Because that is what attention is, life. Every minute you spend arguing with foolishness is a minute not spent strengthening your future. Every hour spent in emotional chaos is an hour stolen from your craft. Every day spent proving yourself to people committed to misunderstanding you is a day you did not become who you could have become. You are paying for nonsense with pieces of your destiny. This is why intelligent people learn to be selective. They select conversations. They select environments. They select relationships. They select battles. They select silence. They do not live open to every passing wind. They do not mistake accessibility for virtue. They do not allow random minds to leave footprints across their inner temple. Selection is not arrogance. Selection is survival. Look at your life honestly. Who drains you and gives nothing back? Who creates confusion every time you try to create peace? Who only becomes reasonable when you become distant? Who needs you weak to feel strong? Who turns every boundary into an argument? Who makes you feel guilty for wanting basic respect. Your body already knows. You are not confused. You are afraid of what the truth will require. The truth may require distance. The truth may require disappointment. The truth may require fewer explanations. The truth may require letting people believe a false story about you. The truth may require loosing approval. The truth may require becoming lonely for a while. But loneliness with peace is better than company with constant disrespect. Do not fear the quiet that comes after removing noise. At first it feels empty because your nervous system was addicted to disturbance. You may even miss the drama. This is not love. This is withdrawal. The body becomes familiar with chaos and then calls peace boring. Stay with the quiet. Let it detox you. In that quiet your intelligence becomes useful again. You begin to think clearly. You begin to work deeply. You begin to notice who actually respects you. You begin to understand that many relationships were not built on love but on your willingness to absorb discomfort. You were the cushion. You were the listener. You were the explainer. You were the patient one. You were the one who made everything easier for people who never asked if you were tired. Now you must become fair to yourself. Dealing with foolish people does not mean becoming cold, it means becoming exact. Exact with your time. Exact with your energy. Exact with your words. Exact with your access. The undisciplined person reacts to everything. The disciplined person asks whether the response has value, whether the room can hold truth, whether silence protects more power than speech, and whether this moment deserves the price of their breath.
To specify the user to login as: System Settings -> Colors & Themes -> Login Screen (SDDM) -> Behavior…
Then nominate the user to login as.
Today on the BBC: Popping a cocktail of supplements every day might be doing you more harm than good. They say “those which are particularly toxic to the liver when taken in high doses include vitamin A, glutamine, ashwagandha and green tea extract.”
Today I am reading The Decision Book which Justin Sung mentioned recently.
A fellow crustacean helped me find out more information about my mechanical pencils by asking on reddit. Turns out they’re still available at Officeworks: Keji Mechanical Pencils. Pretty happy about that! Nice work Internet, and thanks @badtuple! ❤️
Technically there’s nothing special about these mechanical pencils. They’re just cheapo plastic things. But I like them because they are lightweight, the grip is good, they have an eraser, and the nib is clear which means you can check on the status of the lead, if it’s run out or broken. So I am very pleased to now have a lifetime supply of these:
